
Multimedia Gallery
 All images in this series
All images in this series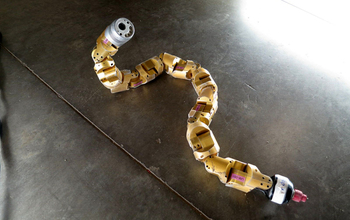
{kind=link}
Snake robots mimic the real thing
Carnegie Mellon University researchers who develop snake-like robots have analyzed the motions of sidewinder rattlesnakes and showed how their complex motion can be described in terms of vertical and horizontal body waves.
More about this image
Researchers at Carnegie Mellon University (CMU) who develop snake-like robots have picked up a few tricks from real sidewinder rattlesnakes on how to make rapid and even sharp turns with their undulating, modular device.
Working with colleagues at the Georgia Institute of Technology and Zoo Atlanta, they have analyzed the motions of sidewinders and tested their observations on CMU's snake robots. The researchers showed how the complex motion of a sidewinder can be described in terms of two wave motions -- vertical and horizontal body waves -- and how changing the phase and amplitude of the waves enables snakes to achieve exceptional maneuverability.
With the model in hand and with a method to measure the movements of living snakes, the researchers, led by Henry Astley, a postdoctoral researcher in Daniel Goldman's group at the Georgia Institute of Technology, was able to observe that sidewinders make gradual changes in direction by altering the horizontal wave while keeping the vertical wave constant. They also discovered that making a large phase shift in the vertical wave enabled the snake to make a sharp turn in the opposite direction. Applying these controls to the robot allowed the robot to replicate the turns of the snake, while also simplifying control.
"By looking for insights in nature, we were able to dramatically improve the control and maneuverability of the robot, while at the same time using the robot as a tool to test the theorized control mechanisms of biological sidewinders," said Astley.
Howie Choset, a professor at CMU's Robotics Institute, says by learning from real sidewinders, the researchers can make maneuvers much more efficient and simplify user control, thereby making their modular robots much more valuable as tools for urban search-and-rescue tasks, power plant inspections and even archaeological exploration.
The research was supported in part by the National Science Foundation (NSF) (grants PHY 1150760, ECCS 0846750, PHY 0848894 and PHY 1205878).
Read more in the CMU news story Carnegie Mellon's snake robots learn to turn by following the lead of real sidewinders. (Date image taken: 2010 to present; date originally posted to NSF Multimedia Gallery: May 17, 2019)
Credit: College of Engineering, Carnegie Mellon University
Images and other media in the National Science Foundation Multimedia Gallery are available for use in print and electronic material by NSF employees, members of the media, university staff, teachers and the general public. All media in the gallery are intended for personal, educational and nonprofit/non-commercial use only.
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (742.2 KB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.