
Multimedia Gallery

{kind=link}
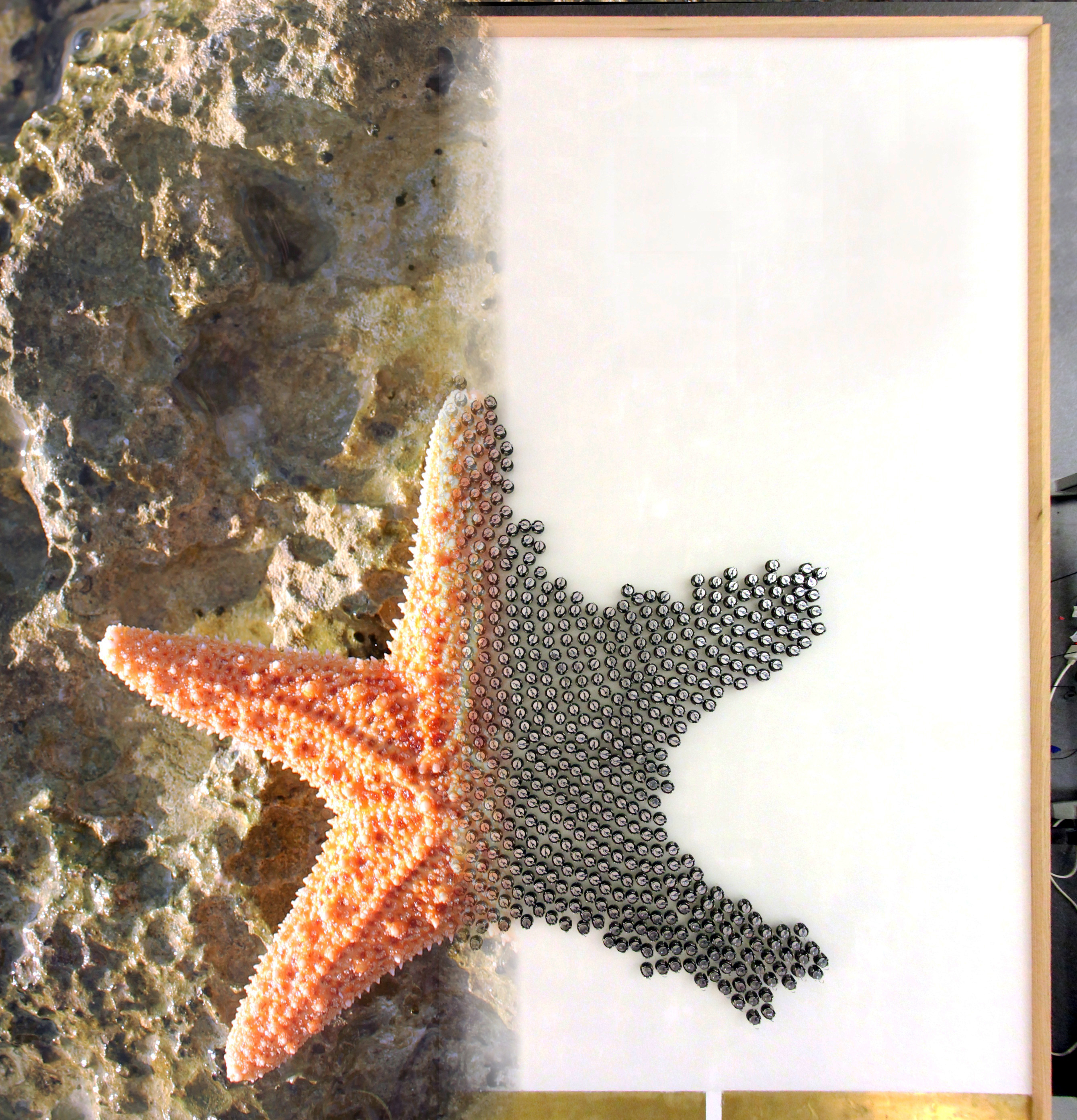
Autonomous devices arrange themselves into complex shapes on command (Image 1)
Just as single cells can assemble into complex, multicellular organisms like a starfish (left), individual Kilobots -- extremely simple robots, each just a few centimeters across, that stand on three, pin-like legs -- can follow simple rules to autonomously assemble into predetermined shapes (right). In this instance, a computer scientist has given a command simultaneously to the swarm of 1,024 Kilobots to "form a sea-star shape." Once the Kilobots receive the command, which is sent via infrared light, they begin to blink at one another and gradually arrange themselves into a specified shape (in this instance, a five-pointed star). (See video of Kilobots forming a sea-star shape Here)
Created by members of the Self-Organizing Systems Research Group at Harvard University, which specializes in distributed algorithms that allow very large groups of robots to act as a colony, the Kilobots represent a significant milestone in the development of collective artificial intelligence (AI). Instead of one highly-complex robot, a "kilo" of robots collaborate, providing a simple platform for the enactment of complex behaviors. The researchers compare this collaboration to nature. For example, in nature, a colony of army ants will link together to form rafts and bridges to cross difficult terrain.
"The beauty of biological systems is that they are elegantly simple and yet, in large numbers, accomplish the seemingly impossible," says Radhika Nagpal, leader of the group and the Fred Kavli Professor of Computer Science at the Harvard School of Engineering and Applied Sciences (SEAS) and a core faculty member at Harvard's Wyss Institute for Biologically Inspired Engineering. "At some level, you no longer even see the individuals; you just see the collective as an entity to itself."
"We are especially inspired by systems where individuals can self-assemble together to solve problems," she adds.
Kilobots require no micromanagement or intervention once an initial set of instructions has been delivered. And Kilobots can correct their own mistakes. If a traffic jam forms or a robot moves off course--errors that are more common in a large group--nearby robots sense the problem and cooperate to fix it.
"Increasingly, we're going to see large numbers of robots working together, whether it's hundreds of robots cooperating to achieve environmental cleanup or a quick disaster response, or millions of self-driving cars on our highways," says Nagpal. "Understanding how to design 'good' systems at that scale will be critical."
This research was supported in part by a grant from the National Science Foundation (IIS 09-26148).
To learn more, see the Harvard Gazette story The 1,000-robot swarm. (Date of Image: April 2013) [See related image Here.]
Credit: Michael Rubenstein, Harvard University
Images and other media in the National Science Foundation Multimedia Gallery are available for use in print and electronic material by NSF employees, members of the media, university staff, teachers and the general public. All media in the gallery are intended for personal, educational and nonprofit/non-commercial use only.
Images credited to the National Science Foundation, a federal agency, are in the public domain. The images were created by employees of the United States Government as part of their official duties or prepared by contractors as "works for hire" for NSF. You may freely use NSF-credited images and, at your discretion, credit NSF with a "Courtesy: National Science Foundation" notation.
Additional information about general usage can be found in Conditions.
Also Available:
Download the high-resolution JPG version of the image. (4.2 MB)
Use your mouse to right-click (Mac users may need to Ctrl-click) the link above and choose the option that will save the file or target to your computer.